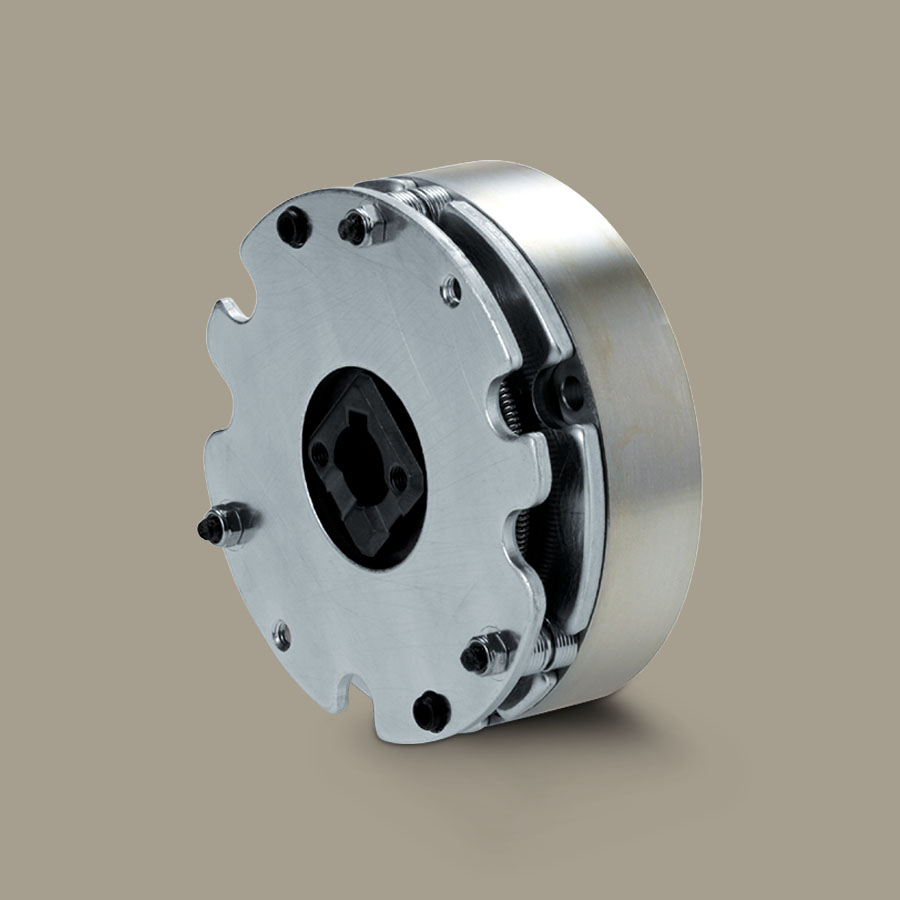
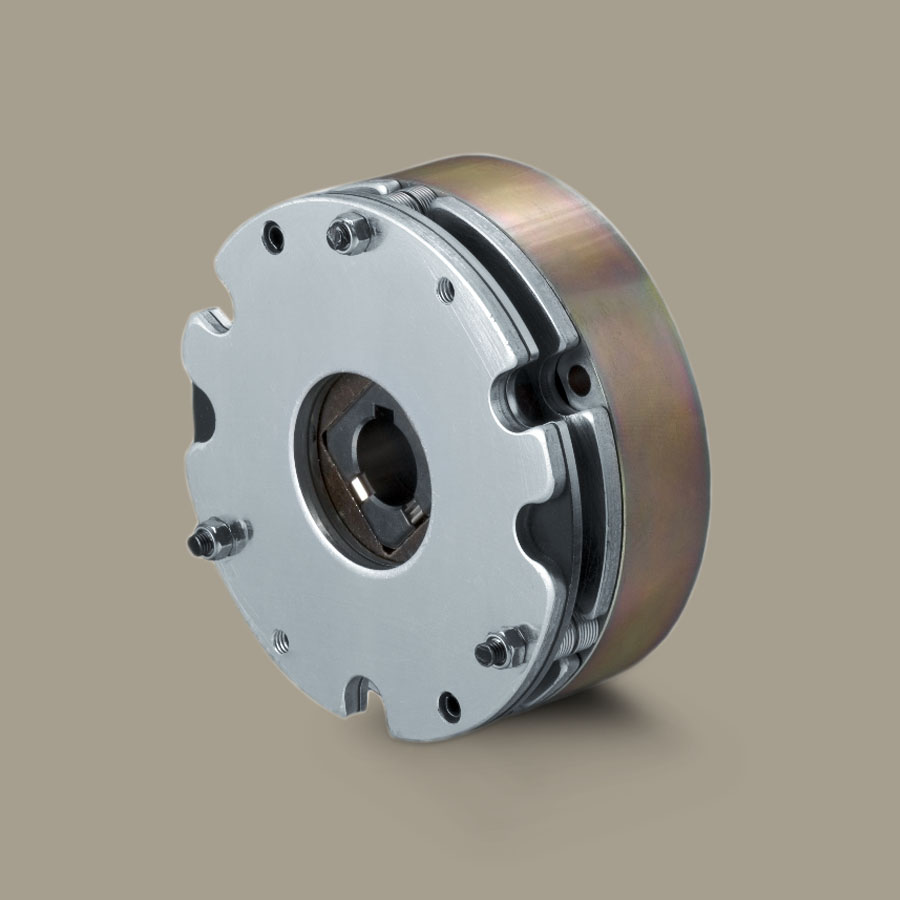
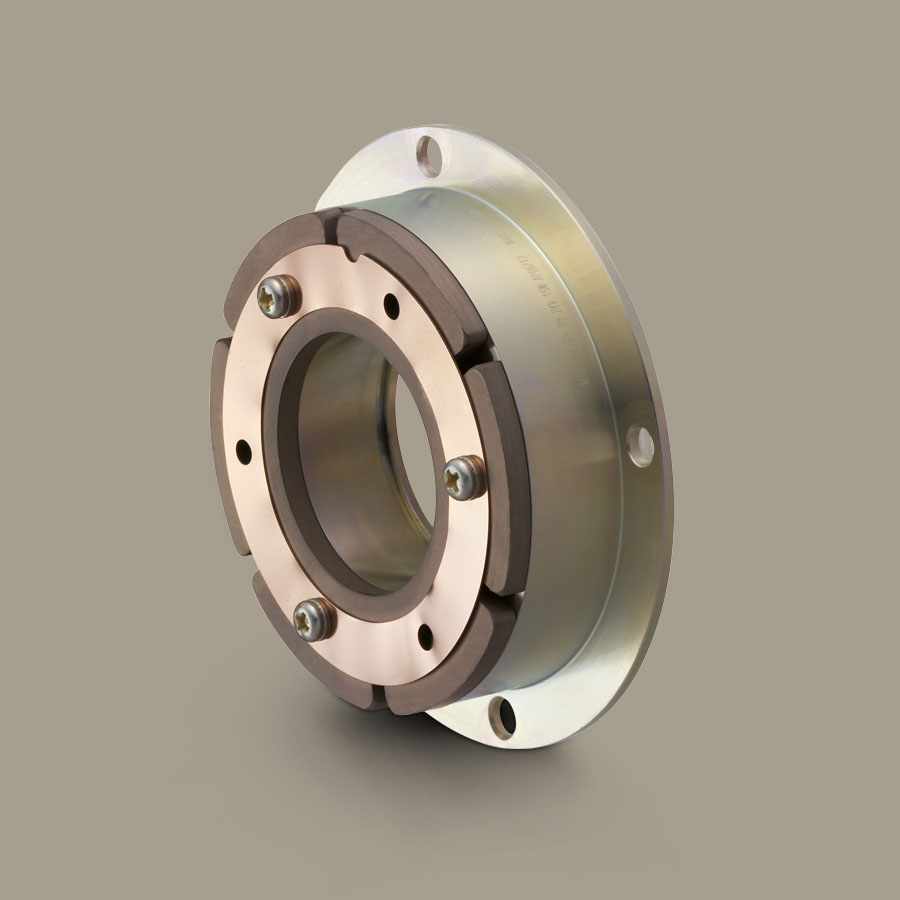
The BXW is the top seller and all-rounder of miniature brakes. It is available with optional holding and / or braking function. The holding variant has twice the torque for the same size. Optionally available with a hand release lever.
Back to overview 

Learn more  Learn more Learn more
Learn more Learn more
Safety brake BXW
- Torque from 0.12 to 5.2 Nm
- Choice between holding and braking function
- Hand release lever available
- Low noise process
- RoHS compliant

| Model | Rated torque (Nm) | Heat class | Max. rpm (min-1) | Moment of inertia J (kg·m2) | Max. braking energy Pbal (W) | Total braking energy ET (J) | Pull in time ta (s) | Release time tar (s) | Mass (kg) | 3D |
| BXW-01-10L | 0.12 | F | 5000 | 0.6 × 10-6 | 2.5 | 1.5 × 106 | 0.008 | 0.015 | 0.2 | |
| BXW-02-10L | 0.25 | F | 5000 | 1.9 × 10-6 | 5 | 3.0 × 106 | 0.008 | 0.015 | 0.3 | |
| BXW-03-10L | 0.5 | F | 5000 | 3.8 × 10-6 | 10 | 4.5 × 106 | 0.025 | 0.025 | 0.4 | |
| BXW-04-10L | 1 | F | 5000 | 12.0 × 10-6 | 20 | 7.0 × 106 | 0.03 | 0.03 | 0.6 | |
| BXW-05-10L | 2 | F | 5000 | 23.0 × 10-6 | 30 | 12.0 × 106 | 0.035 | 0.035 | 0.8 |
Type 10L: For braking applications, available voltages: 12, 24, 45, 90 and 180 V DC
| Model | Rated torque (Nm) | Heat class | Max. rpm (min-1) | Moment of inertia J (kg·m2) | Max. braking energy Pbal (W) | Total braking energy ET (J) | Pull in time ta (s) | Release time tar (s) | Mass (kg) | 3D |
| BXW-01-10H | 0.24 | F | 5000 | 0.6 × 10-6 | 0.5 | 0.2 × 106 | 0.01 | 0.01 | 0.2 | |
| BXW-02-10H | 0.5 | F | 5000 | 1.9 × 10-6 | 1 | 0.3 × 106 | 0.01 | 0.01 | 0.3 | |
| BXW-03-10H | 1 | F | 5000 | 3.8 × 10-6 | 2 | 0.5 × 106 | 0.035 | 0.02 | 0.4 | |
| BXW-04-10H | 2 | F | 5000 | 12.0 × 10-6 | 4 | 1.0 × 106 | 0.04 | 0.025 | 0.6 | |
| BXW-05-10H | 4 | F | 5000 | 23.0 × 10-6 | 6 | 2.0 × 106 | 0.045 | 0.03 | 0.8 |
Type 10H: For braking and holding applications, available voltages: 12, 24, 45, 90 and 180 V DC
| Model | Rated torque (Nm) | Heat class | Max. rpm (min-1) | Moment of inertia J (kg·m2) | Max. braking energy Pbal (W) | Total braking energy ET (J) | Pull in time ta (s) | Release time tar (s) | Mass (kg) | 3D |
| BXW-01-10S | 0.36 | F | 5000 | 0.6 × 10-6 | - | - | 0.025 | 0.01 | 0.2 | |
| BXW-02-10S | 0.75 | F | 5000 | 1.9 × 10-6 | - | - | 0.03 | 0.01 | 0.3 | |
| BXW-03-10S | 1.5 | F | 5000 | 3.8 × 10-6 | - | - | 0.035 | 0.02 | 0.4 | |
| BXW-04-10S | 2.6 | F | 5000 | 12.0 × 10-6 | - | - | 0.04 | 0.025 | 0.6 | |
| BXW-05-10S | 5.2 | F | 5000 | 23.0 × 10-6 | - | - | 0.045 | 0.03 | 0.8 |
Type 10S: For holding applications, available voltages: 12, 24, 45, 90 and 180 V DC
| Model | Rated torque (Nm) | Heat class | Max. rpm (min-1) | Moment of inertia J (kg·m2) | Max. braking energy Pbal (W) | Total braking energy ET (J) | Pull in time ta (s) | Release time tar (s) | Mass (kg) | 3D |
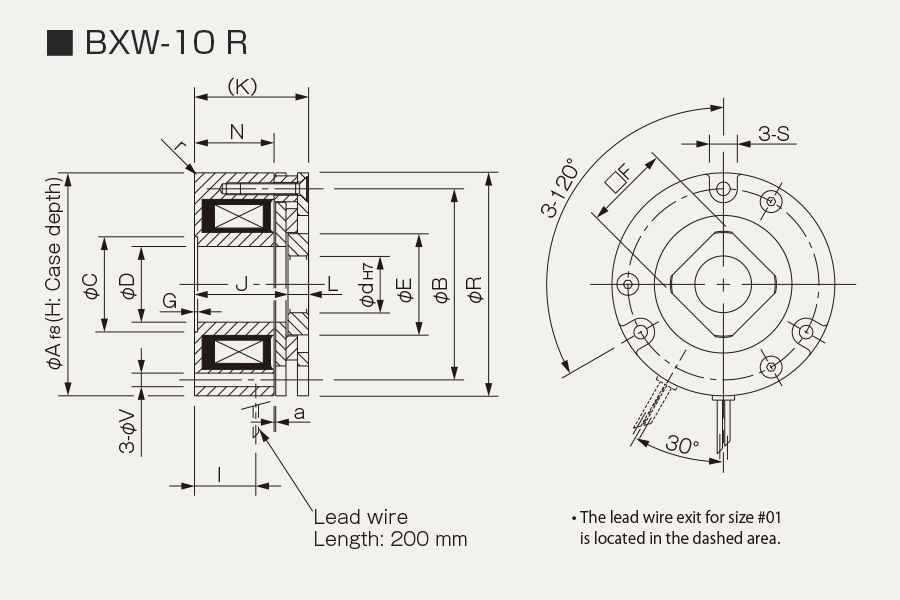
| BXW-01-10R | 0.3 | F | 6000 | 1.36 × 10-7 | 15 | 3000 | 0.035 | 0.02 | 0.1 | |
| BXW-03-10R | 1.3 | F | 6000 | 1.17 × 10-6 | 87 | 17000 | 0.05 | 0.02 | 0.3 | |
| BXW-05-10R | 2.5 | F | 6000 | 3.68 × 10-6 | 200 | 40000 | 0.06 | 0.02 | 0.5 |
Type 10R: Special series for Servomotor application, available voltage: 24 V DC
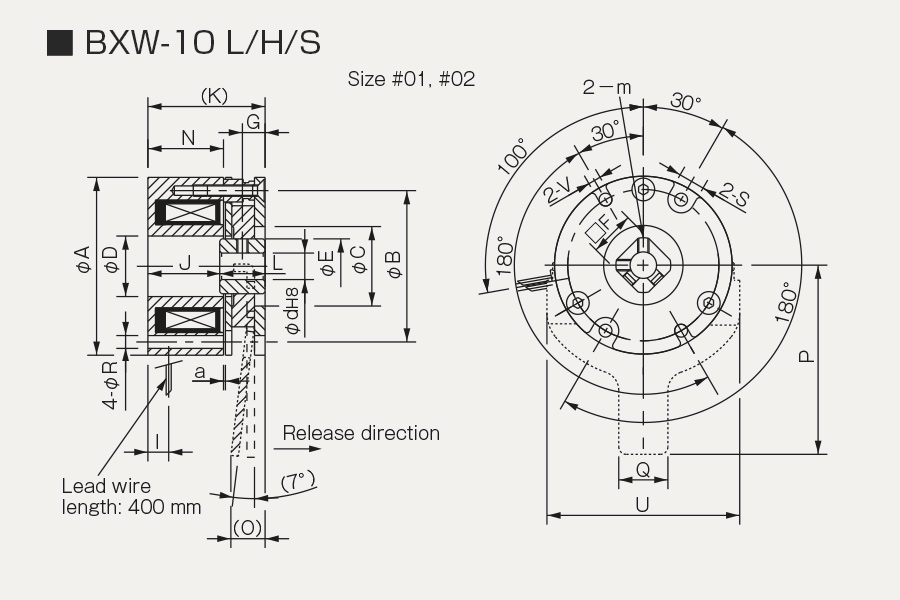
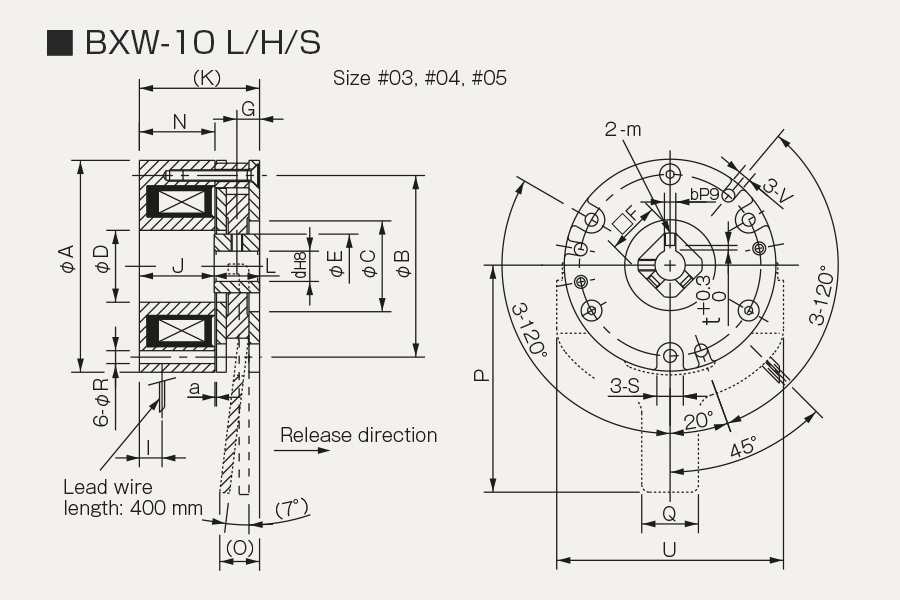
Unit [mm]
| Model | A | B | C | D | E | S | V | R | F | G | I | J | K | L | N | a | 3D |
| BXW-01-10 L/H/S | 37 | 32 | 18 | 13.5 | 12 | 6 | 3 | 3 | 10 | 4.5 | 5 | 22.5 | 31.5 | 9 | 22.5 | 0.1 | |
| BXW-02-10 L/H/S | 47 | 40 | 21 | 16 | 14.5 | 7 | 3.4 | 3.4 | 12 | 6 | 5.5 | 19.2 | 31.2 | 12 | 20 | 0.1 | |
| BXW-03-10 L/H/S | 56 | 48 | 24 | 19 | 17 | 7 | 3.4 | 3.4 | 14 | 6 | 6 | 19.9 | 31.9 | 12 | 20 | 0.15 | |
| BXW-04-10 L/H/S | 65 | 58 | 35 | 24 | 22 | 7 | 3.4 | 3.4 | 18 | 7 | 7 | 19.9 | 33.9 | 14 | 21 | 0.15 | |
| BXW-05-10 L/H/S | 75 | 66 | 36 | 28 | 26.5 | 9 | 4.5 | 4.5 | 22 | 7 | 7 | 22.1 | 36.1 | 14 | 21.5 | 0.15 |
Unit [mm]
| Model | A | r | B | C | D | E | S | V | R | F | G | H | I | J | K | L | N | a | 3D |
| BXW-01-10R | 33 | R0,5 | 26.5 | 16 | 9 | 14 | 7 | 3.4 | 32.5 | 12 | 0.2 | 4 | 19 | 26 | 30 | 4 | 22.8 | 0.1 | |
| BXW-03-10R | 48 | R1 | 42 | 26 | 14 | 23 | 8 | 3.4 | 47.5 | 19 | 0.2 | 4 | 18 | 26 | 30 | 4 | 22.6 | 0.1 | |
| BXW-05-10R | 64 | R1 | 56 | 28 | 22 | 31 | 8 | 4.5 | 63.5 | 25 | 0.2 | 4 | 16 | 25.5 | 30 | 4.5 | 21.3 | 0.1 |
Robotic
Due to the steadily increasing degree of automation, especially in the industrialized countries, the demand for industrial and collaborative robots is a strongly growing industry segment. Extremely important are the high positioning accuracy as well as the safety of such…

Servomotor
Used in the field of robotics, handling automation or for the drive of linear actuators, the requirements to the new series of Servomotors is rising daily. For the safety application in a servomotor, especially in the case of a power shortage or emergency stop, Miki Pulley…

Medical
The Industry of medical technology only accepts the highest standards in safety and precision. In case of a malfunction a person’s health could seriously be affected. Devices such as computed tomography, surgical stands and patient beds often contain more technology…

Alternative products

Direct contact
お問い合わせ
Let us advise you personally today.
We look forward to hearing from you!
Start inquiryWe look forward to hearing from you!
×